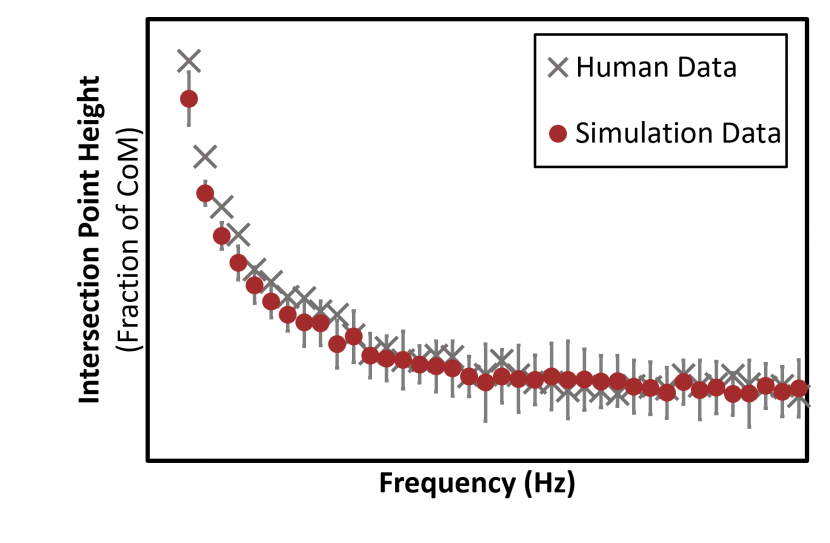
Balance is an unstable task that requires control of translational and rotational motions. Humans use foot-ground interaction force, characterized by direction, point of application, and magnitude, to manage body accelerations. Previous work identified a point of intersection of foot-ground interaction forces that exhibited consistent frequency-dependent behavior across multiple subjects. To test whether this frequency-dependent behavior […]
Many lower extremity exoskeletons assist in locomotion, but for this to be possible, the exoskeleton must work in synchrony with the user. Adaptive control for this interaction proves to be difficult because of how dynamic humans are. Many of the commercially available lower extremity exoskeletons attempt to provide adaptive control for their dynamic users in […]
While rehabilitation of upper-limb motor function with human-interactive robots has been met with success, robot-aided locomotor rehabilitation has proven challenging. Conventional therapeutic robots for walking impose pre-planned repetitive kinematic trajectories on patients using high-gain trajectory tracking controllers. This approach may have discouraged active engagement of patients in making movements and interfered with the natural oscillatory dynamics of […]
In human locomotion, we continuously modulate joint mechanical impedance of the lower limb (hip, knee, and ankle) either voluntarily or reflexively to accommodate environmental changes and maintain stable interaction. Ankle mechanical impedance plays a pivotal role at the interface between the neuro-mechanical system and the physical world. We characterized human ankle mechanical impedance in […]
Humans exhibit remarkable locomotion capabilities that out-perform modern robots, while considering the complexity of the musculo-skeletal system and its ‘slow’ feedback loop. Our understanding of neuro-mechanical control model of balance is yet limited. A better understanding of human neuro-muscular controller may guide a proper way to rehabilitate or to assist impaired people, and even facilitate […]