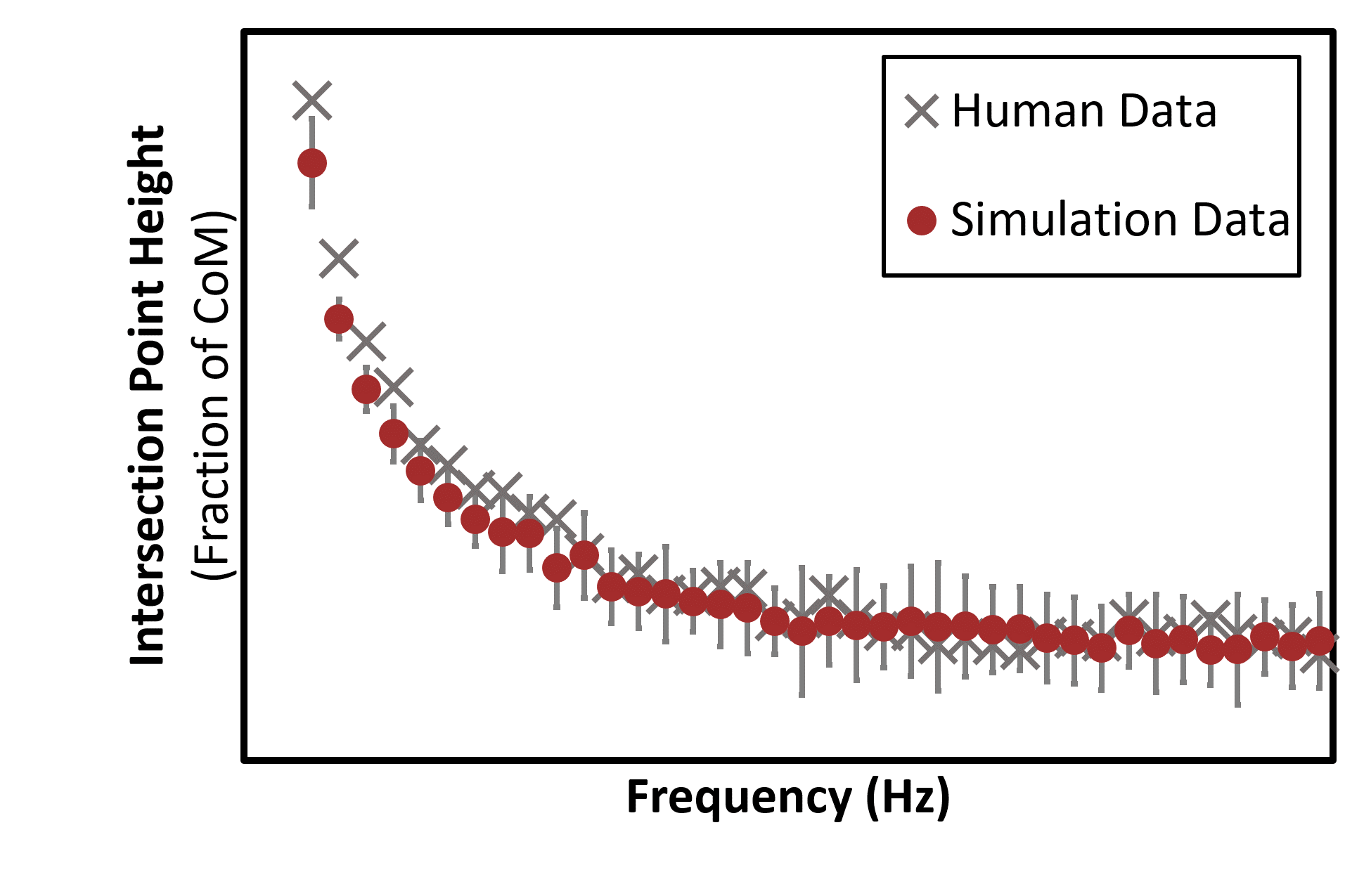
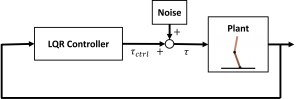
Balance is an unstable task that requires control of translational and rotational motions. Humans use foot-ground interaction force, characterized by direction, point of application, and magnitude, to manage body accelerations. Previous work identified a point of intersection of foot-ground interaction forces that exhibited consistent frequency-dependent behavior across multiple subjects. To test whether this frequency-dependent behavior provided a distinctive signature of neural control or was a necessary consequence of biomechanics, this study simulated quiet standing and compared the results with human subject data. If a standing human was modeled as a single inverted pendulum, no controller could reproduce the experimentally observed frequency-dependence of the intersection point. The simplest competent model that approximated a standing human was a double inverted pendulum with torque-actuated ankle and hip joints. It was stabilized by a linear feedback controller based on position and velocity errors of each joint. Numerous controller parameter sets could stabilize this model and produce a change in vertical position of the intersection point with increasing frequency; the observed decrease in height appears to reflect a biomechanical constraint. However, a controller that best reproduced the results observed in human standing used minimal effort and more ankle torque than hip torque. These observations imply that human subjects employed a neural strategy that prioritizes the use of the ankle torque and minimizes overall control effort to balance.
—- Kaymie Shiozawa and Jongwoo Lee