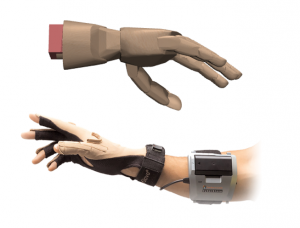
Wire-harness installation is currently a complex manual manipulation task in the manufacturing process of large electrical systems. Simply put, wire harnessing is the assembly of electrical cables used in machinery, such as aircrafts, automobiles, and other electrical systems. It has been proposed that incorporating robots into this system can help the human operator. This project aims to explore that idea by understanding exactly how the human worker manipulates wire harnesses during this manufacturing task. By measuring the human operator’s kinematic motion using a CyberGlove, we hope that we can implement these onto a simulation program called MuJoCo to better understand the human operator’s modulation of force and impedance.
Aaron Michael West